发那科机器人仿真软件是一款可以帮助用户们制作虚拟机器人的3D仿真软件。通过该软件,我们可以轻松完成机器人的开发工作,再也不用像以往一样,需要自己不断的时间操作去进行开发,可以帮助用户们省去不少的时间,让我们的工作效率可以得到显著提升。
【软件特色】
具有图形化UIF组件的完全集成的环境可简化机器人单元的教学过程
流程浏览器。
广泛的工作单元教程
有关如何操作软件的过程的广泛帮助
示例工作单元
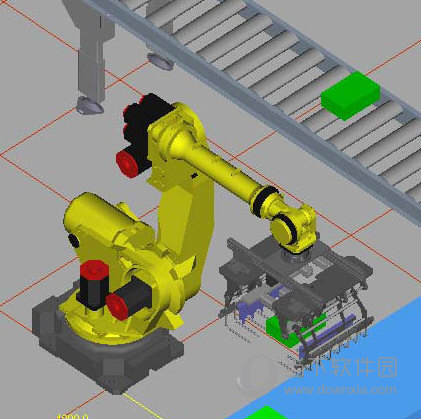
完整的3D世界环境:具有缩放,平移和旋转功能。
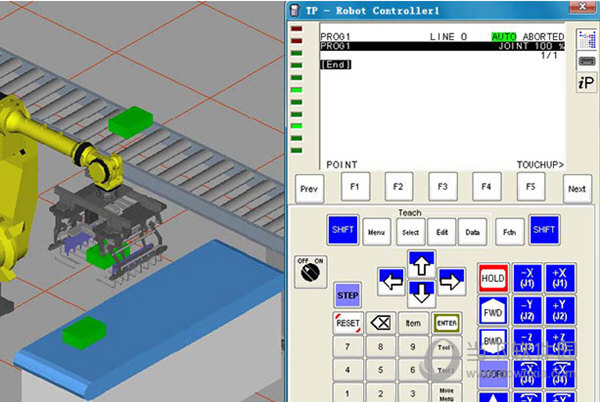
机器人慢跑:手臂拖放教学工具和传统的教学吊坠式慢跑结束。
单个机器人工作单元:支持多个机器人
【软件功能】
【工作单元库】
基本CAD模型的CAD库
能够将自己的图像添加到库中
【创建多组和多轴机床】
轻松创建由机器人控制器电机驱动的机器。电机可以是扩展轴或多组定义的控制器配置
【程序教学】
创建基本的TPP程序
通过慢跑机器人,手动输入或单击单元格中的对象来教导TPP位置
支持MHPICK和PLACE位置的自动示教
运动陈述,等待陈述支持
单个正在运行的程序支持。稍后支持多个正在运行的程序。
打开/关闭手视图设置
打开/关闭手指令,使工作单元拾取和放置应用程序具有动画效果。
从CAD生成程序:在CAD文件中查找实体,并使用这些实体自动生成机器人程序。此功能可以大大减少编程时间

【支持UTOOLS】
将工具图形附加到机器人上以进行打开和关闭成像
定义UTOOL值
【支持UFRAMES】
将UFRAMES与工作单元对象相关联
相对于UFRAMES进行教学。允许移动带有零件/夹具的示教位置以检查范围。
快速将示教参考系从世界坐标更改为UFRAME坐标系